
让自动驾驶更“聪明” 上汽AI LAB视觉团队自动驾驶获全球第一
9月7日,上汽AI LAB视觉团队自动驾驶检测跟踪算法在国际榜单nuScenes上斩获全球第一,将跟踪算法关键指标AMOTA(Average Multiple Object Tracking Accuracy)在现有最高记录上提升3个百分点。此前,团队已凭借纯视觉BEV目标检测算法的全新突破在nuScenes上夺得全球第三的成绩,实现感知数据从后融合至前融合模型的跨越式提升,并验证了优异的算法表现。
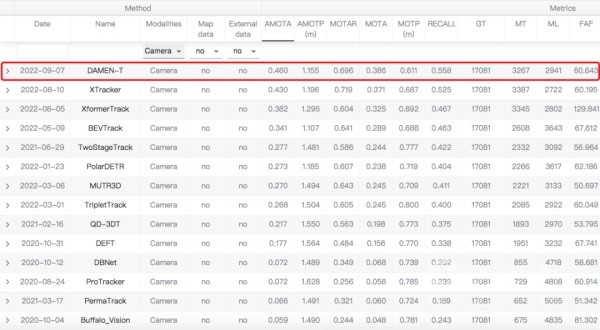
上汽AI LAB检测跟踪算法在国际榜单nuScenes上位列全球第一(Camera only without map data or external data)
多目标跟踪(Multiple Object Tracking)是自动驾驶领域感知技术中的重要一环。首先需要通过传感器检测自车周围目标,并为其赋予唯一ID,在追踪过程中,算法必须实现运动中目标物ID不能发生跳变,由此得到目标物当前与历史运动状态,预估之后的可能位置。目标跟踪为下游的融合与规划控制提供了重要的运动状态数据,自动驾驶过程中的决策,例如避让、变道,便需要基于以上数据。
算法作为智驾核心所在,技术能力与技术表现成为自动驾驶企业关注的热点,在nuScenes榜单上,目标检测(Detection)、目标跟踪(Tracking)等热门赛道竞争激烈,不断发生突破创新。众多企业与高校学术团队投入技术研发与提升,其中包括了广汽集团、DeepMotion、地平线、理想汽车等企业团队,以及清华大学、华中科技大学等高校。
nuScenes数据集
nuScenes是一个全球公认的用于自动驾驶的权威大规模数据集。数据集由Motional(前身为nuTonomy)团队开发,在波士顿和新加坡收集了1000个驾驶场景。nuScenes于2019年发布的完整数据集包括大约140万个相机图像、39万个激光雷达扫描、140万个雷达扫描和4万个关键帧中的140万个对象边界框。同时,它是第一个提供来自自动驾驶汽车的整个传感器套件(6个摄像头、1个激光雷达、5个雷达、GPS、IMU)的数据的大规模数据集。
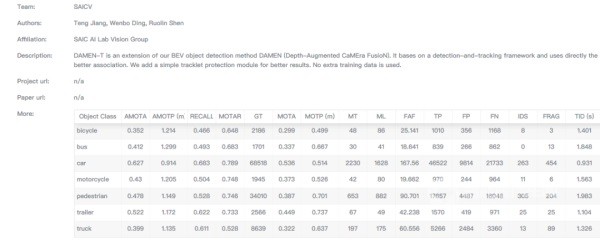
上汽AI LAB跟踪算法DAMEN-T是自主研发的BEV目标检测方法 DAMEN(Depth-Augmented CaMEra FusioN)的扩展。在BEV空间下,传统后融合方案存在的问题得到有效解决,覆盖车身360°视野范围的6个相机获取的感知信息由一个模型统一处理,共享同一视野,显著提升了处理速度与准确性。
团队在BEV目标检测的基础上,增加跟踪器来完成跟踪任务,并优化了每个类别的3D IoU和运动模型以获得更好的关联。值得一提的是,上汽AI LAB团队的跟踪算法DAMEN-T引入了在落地项目中设计的跟踪器优化技巧,与目标检测算法相结合,在现有方案中脱颖而出、摘得桂冠。相比于尚处于学术研究阶段的方案,DAMEN-T工程化程度更高,已经过实际项目的不断迭代,可以与落地量产高度适配。
鸟瞰图下的目标检测结果可视化
六路图像上的目标检测结果可视化
在下一个阶段,一方面,上汽AI LAB团队会将现有纯视觉方案进一步拓展至多传感融合,包括Lidar与Radar。另一方面,根据目标检测及跟踪得到的目标物准确运动状态信息,在BEV空间下还可以探索对目标物轨迹的预测,让自动驾驶车辆更“聪明”。
未来,上汽AI LAB将继续走在智驾技术自主研发的前沿一线,同时推动Robotaxi的量产应用,落实上汽集团“新四化”战略,促进共享出行领域的智能化、网联化发展。
-
 新增58座换电站 蔚来能源发布9月加电报告
新增58座换电站 蔚来能源发布9月加电报告10月4日,蔚来能源发布9月加电报告,新增布局58座换电站,其中有55座是第四代换电站。换电县县通计划稳步开展,新增覆盖6个县级行政区。蔚来高速换电网络升级至7纵7横12大城市群。
2024-10-06 -
 新增及优化10项充电功能 理想汽车发布9月用户充电报告
新增及优化10项充电功能 理想汽车发布9月用户充电报告10月4日,理想汽车发布9月用户充电报告,总计迎来10项充电功能的新增及优化。充电性能、充电地图体验持续升级。新增理想MEGA 5C超充报告,优化末端充电时间、充电地图展示等功能。
2024-10-06 -
 限时10.98万元起 吉利银河E5公布10月购车政策
限时10.98万元起 吉利银河E5公布10月购车政策日前,吉利银河新能源公布吉利银河E5的10月购车政策,2024年10月31日前大定的用户依旧可享此前执行的多重购车权益。
2024-10-06 -
 原创 9月新势力销量:“理小零”创新高,极氪支棱起来了!
原创 9月新势力销量:“理小零”创新高,极氪支棱起来了!随着“金九”结束,各大造车新势力纷纷发布9月成绩单,金九银十的行情已步入正轨,多家造车新势力再创新高。
2024-10-06 -
 丰田汽车氢能事业总部总裁山形光正到海南海马交流访问
丰田汽车氢能事业总部总裁山形光正到海南海马交流访问9月28日上午,丰田汽车氢能事业总部总裁山形光正一行到海马汽车海南基地交流访问。海南海马汽车总经理卢国纲、副总经理尹春山、总经理助理温国安等热情接待。
2024-10-05
